Project CH4RL13 - My end of year project
It's been a while since I have updated my blog and documented projects, but I have been extremely busy. It's been a tough year, with me both studying and teaching but I have now taken a break to concentrate on my final academic project. This by no means signifies the end of this blog after I complete it; I will continue to use this blog to post my experiments in code and physical computing, thoughts and other related matters.
With that said, I have a ton of material and documentation to put on here for my final project, as I have not been very good at updating it, although I have been documenting at every chance.
A little about my project: it was born out of my newly acquired skills along with my fascination with robots since I was a child, the subjects of play, mimicry and transhumanism (with a dash of inspiration from a childhood favorite classic arcade game One Must Fall 2097 as well as current exhibitions such as this one at the Science Museum and this one at the Barbican ).
I love making things, particularly with ordinary materials and use them outside of their applications.
So I started with a sketch, but obviously this was for the sole purpose of putting an ideal concept on paper, from which to base myself on, particularly in what concerns aesthetics. Other factors such as cost and time are considered and I will take the concept as close as possible to the original.

But in summary, CH4RL13 is an experiment in mimicry, play and transhumanism. The objective is to give the viewer/user a first person view or an experience of having conscience transferred into a machine, experiencing a bit of depersonalization.
Anyway, now a little about the practical and technical side of things:
But so set in stone are:
Hardware:
2 x Arduino Mega 2560
1 x Raspberry Pi Zero W
RF Transmitters/Receivers (433Mhz or 315Mhz, depending on which causes or gets less interference)
1xAdafruit PWM Servo Hat for Arduino (originally I wanted to use Servos straight on the board, but space and library conflicts ended up taking me to the Servo Hat as a final solution)
16+ Servos (SG90s and MG90s, but currently replacing some with MG995R)
1x L293D Bridge
1x Tamiya Tracked Vehicle Chassis (might have to replace this)
6+ LiIon 18650 batteries
4x Maplin Project Boxes
20x Servo cable extenders
1x FPV transmitter & FPV receiver
....and there's a few more things, list is too long to put down here.
I initially thought I could make it in lightweight metal, and for a time it looked viable. But the stress on the servos was enourmous. I have then started to consider other avenues. But here is a little visual narrative of the start of the project.





Trying to fix the broken acrylic claws with a sheet of acrylic bought from a local building materials retailer.







 Making flex sensors with leftover materials, testing rubber based ones, which seemed to be quite stable.
Making flex sensors with leftover materials, testing rubber based ones, which seemed to be quite stable.

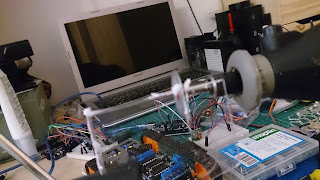
Initial tests of moving arms. The servos are receving values via RF from the bend sensor. At this point, the movements were quite abrupt.





With that said, I have a ton of material and documentation to put on here for my final project, as I have not been very good at updating it, although I have been documenting at every chance.
A little about my project: it was born out of my newly acquired skills along with my fascination with robots since I was a child, the subjects of play, mimicry and transhumanism (with a dash of inspiration from a childhood favorite classic arcade game One Must Fall 2097 as well as current exhibitions such as this one at the Science Museum and this one at the Barbican ).
I love making things, particularly with ordinary materials and use them outside of their applications.
So I started with a sketch, but obviously this was for the sole purpose of putting an ideal concept on paper, from which to base myself on, particularly in what concerns aesthetics. Other factors such as cost and time are considered and I will take the concept as close as possible to the original.

But in summary, CH4RL13 is an experiment in mimicry, play and transhumanism. The objective is to give the viewer/user a first person view or an experience of having conscience transferred into a machine, experiencing a bit of depersonalization.
Anyway, now a little about the practical and technical side of things:
But so set in stone are:
Hardware:
2 x Arduino Mega 2560
1 x Raspberry Pi Zero W
RF Transmitters/Receivers (433Mhz or 315Mhz, depending on which causes or gets less interference)
1xAdafruit PWM Servo Hat for Arduino (originally I wanted to use Servos straight on the board, but space and library conflicts ended up taking me to the Servo Hat as a final solution)
16+ Servos (SG90s and MG90s, but currently replacing some with MG995R)
1x L293D Bridge
1x Tamiya Tracked Vehicle Chassis (might have to replace this)
6+ LiIon 18650 batteries
4x Maplin Project Boxes
20x Servo cable extenders
1x FPV transmitter & FPV receiver
....and there's a few more things, list is too long to put down here.
I initially thought I could make it in lightweight metal, and for a time it looked viable. But the stress on the servos was enourmous. I have then started to consider other avenues. But here is a little visual narrative of the start of the project.

It all started as two copper arms powered by servos. Copper soon proved heavy on the servos.
Testing mapping values to a servo, a slightly stronger one (MG90S) than the initial ones (SG90).

Mock ups. The plan was an aluminium bodied frame. But it all proved to much for the servos. Acrylic claws however, couldn't handle the small servos and broke.

The weaker servos lead to a materials and design change. Plastic and found materials. A personality started to take shape.

Trying to fix the broken acrylic claws with a sheet of acrylic bought from a local building materials retailer.

That plan was soon dropped and new claws were ordered.

The initial copper arms were actually installed to the new frame to start with.

But the servos soon proved to not be able to handle either copper and later on, plastic with other servos mounted onto the joints.

Making coiled copper wire antenas for the 433Mhz receiver and Transmitter



Copper wire antenna soldered onto transmitter.

Coiled antena for receiver being made


Initial tests of moving arms. The servos are receving values via RF from the bend sensor. At this point, the movements were quite abrupt.
Soldering on the Adafruit PWM Servo Hat pins. The Hat supports 16 servos, just about the amount I need
More testing. It begins to have a bit of character.
It in fact, has an IR camera installed for eyes, but at this point is not active yet. It will be RPi based with a FPV module
Had to change the head tilt servo. Testing.
It has been a challenging yet rewarding and educational project so far. There are a few more changes to consider, in terms of interactivity, but so far the challenges of radio communication and design have been overcome.
More to come soon, including code and functionality.
Until next time,
Luis


Comments
Post a Comment